WorldMotion
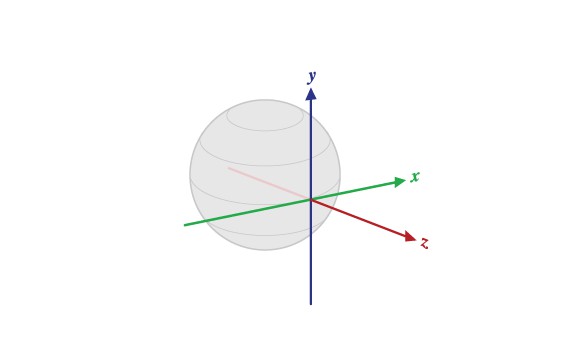
Use a CoreMotion sensor to use a coordinate system that represents device motion or position relative to the Earth. In this coordinate system:
- y points to magnetic north along the surface of the Earth.
- x is 90 degrees from y , pointing approximately east.
- z extends up into space. Negative z extends down into the ground
Determining device orientation
Device orientation is the position of the device in space relative to the Earth's coordinate system (specifically, to the magnetic north pole).
The getRotationMatrix() method generates a rotation matrix from the accelerometer and geomagnetic field sensor. A rotation matrix is a linear algebra concept that translates the sensor data from one coordinate system to another—in this case, from the device's coordinate system to the Earth's coordinate system.
The getOrientation() method uses the rotation matrix to compute the angles of the device's orientation. All of these angles are in radians, with values from -π to π. There are three components to orientation:
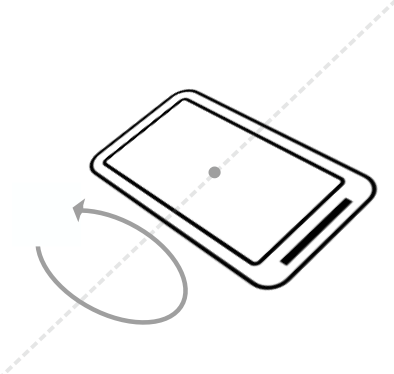
Azimuth : The angle between the device's current compass direction and magnetic north. If the top edge of the device faces magnetic north, the azimuth is 0.
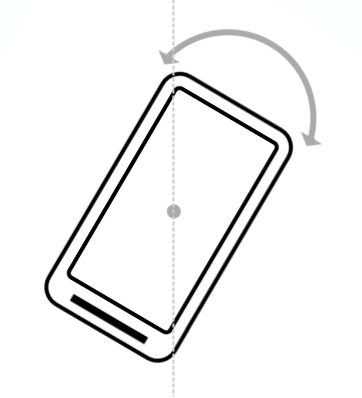
Pitch : The angle between a plane parallel to the device's screen and a plane parallel to the ground.
Roll : The angle between a plane perpendicular to the device's screen and a plane perpendicular to the ground.
Note: orientation angles use a different coordinate system than the one used in aviation (for yaw, pitch, and roll). In the aviation system, the x -axis is along the long side of the plane, from tail to nose.
Use case
Let's assume that you want to know the angle of rotation around a certain object in the real world, so you need the value x from the Earth's coordinate system.
- Convert a rotation vector to a rotation matrix.
let matrixFromVector = rotationMatrix.getRotationMatrixFromVector()
- Rotating the supplied rotation matrix so it is expressed in a different coordinate system using.
let coordinateMatrix = matrixFromVector.coordinateSystem(CMRotationMatrix.axisX, CMRotationMatrix.axisY)
- Compute the device's orientation based on the rotation matrix.
let acceleration = coordinateMatrix.getOrientation()
The return values is a radius that needs to be converted into degrees using
toDegrees
Output
Using
- EarthCoordinate:
let earthCoordinate = EarthCoordinate()
// .......
deinit {
earthCoordinate.stop()
}
override func viewDidAppear(_ animated: Bool) {
super.viewDidAppear(animated)
earthCoordinate.delegate = self
earthCoordinate.start(interval: 0.2, queue: .init())
}
// MARK: - EarthCoordinate delegate
extension ViewController: EarthCoordinateDelegate {
func onOrientationChange(x: Double, y: Double, z: Double) {
// ..... calculate value degrees
}
}
- RotationMatrix
let rotationMatrix = deviceMotion.attitude.rotationMatrix
let matrixFromVector = rotationMatrix.getRotationMatrixFromVector()
let coordinateMatrix = safeSelf.getCoordinateSystem(with: matrixFromVector)
let acceleration = coordinateMatrix.getOrientation()
Example
To run the example project, clone the repo, and run pod install from the Example directory first.
Requirements
- Swift 4.2+
- Xcode 10.0+
- iOS 11.0+
Installation
WorldMotion is available through CocoaPods. To install
it, simply add the following line to your Podfile:
pod 'WorldMotion'
Author
Ahmad Almasri, [email protected]