Applied-AI Final Project: Real-Time Detection for Autonomous Vehicles on Low Power Devices
Summary:
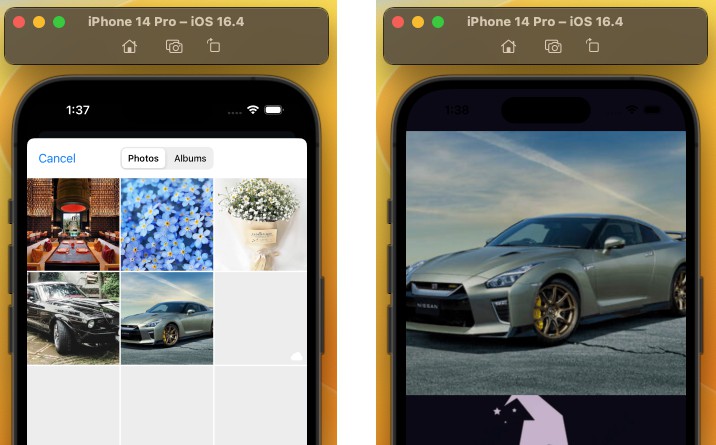
This project implemented an autonomous driving object detector using YOLOv7 and the Udacity dataset. The model was converted to Core ML after training and inference was ran on an iPhone 13 Pro.
Included:
Results:



Notes:
The app works best when the device is oriented in the landscape position with camera facing to the left. The apps framerate has been limited to 60 fps since the model could no exceed that. The maximum framerate supported from the camera is 240 fps. The resultion is set to 1080p but can be increased to 4k or lowered to 720.